西尔康首页
|
加入收藏
|
联系我们
|
Language
中文
English
русский
首页
关于西尔康
企业简介
企业理念
荣誉资质
公司一角
新闻资讯
行业资讯
公司新闻
产品中心
工业控制
西尔康低压变频器
西尔康Z2000系列
◇ Z2000系列迷你型变频器: ◇ 机型外观尺寸超小,迷你精巧, ◇ 轻巧紧凑设计,操作方便 ◇ 产品技术指标: 项目名称 Z2000 输入 额定电压、频率 …
西尔康Z2000系列
◇ 变频器型号说明: ◇ 产品技术指标: 项 目 名 称 H2000 输入 额定电压、频率 1PH AC 220V 50/60Hz;3PH AC380V 50/60Hz 电压允许范围 …
西尔康H3000系列
◇ 变频器型号说明: ◇ 产品技术指标: 项目名称 H3000 输入 额定电压、频率 3PH380V 50/60Hz;1PH/3PH220V 50/60Hz 3PH690V 50/60Hz;3PH114…
西尔康H5000系列
◇ 功能描述: 1.实现多达六台水泵的供水控制,其中一台为主机,其他为从机。 2.任意主机功能:系统任意一台可选择为主机,当当前主机出故障,可以选用另一从机为主机,只需要把压力传感器信号线移到新…
西尔康H6000S系列
变频器的综合技术特性: • 输入输出特性 - 输入电压范围:220/380/690V±15% - 输入频率范围:47~63Hz - 输出电压范围:0~额定输入电压 - 输出频率范围:0~600Hz • 外围接口特性 - 可编程数字输入:7路开…
西尔康S300系列
1、S300产品技术规范 控 制 特 性 控制方式 …
西尔康S800系列
型号说明: 铭牌说明: 变频器选型: 型号 额定输电流(A) 额定输出电流(A) 适配电机 KW …
西尔康中压变频器
西尔康中压系列
西尔康高压变频器
西尔康高压系列
>> 应用范围 电力工业:锅炉给水泵、送风机、引风机等; 采矿行业:矿井的排水泵和排风扇等; 冶金行业:高炉鼓风机、炼钢制氧机、除尘机等; 石化行业:大型输油泵、化工生产的压缩机等;城市建设:自来水…
伺服
伺服
伺服马达
伺服驱动器
触摸屏
西尔康人机界面MT508T
型 号 MT508T 硬件规格 ( Hardware Specifications ) …
西尔康人机界面MT506L
型 号 MT 506L 硬件规格 ( Hardware Specifications ) 外壳颜色 黑/银白可选 …
西尔康人机界面MT4500L
型 号 MT4500L 硬件规格( Hardware Specifications ) …
西尔康人机界面MT4400T
型 号 MT4400T 硬件规格 ( Hardware Specifications ) …
西尔康人机界面MT4300T
型 号 MT4300T 硬件规格 ( Hardware Specifications ) …
西尔康人机界面MT4300C
型 号 4300C 硬件规格 ( Hardware Specifications ) …
西尔康人机界面MT4300L
型 号 MT4300L 硬件规格 ( Hardware Specifications ) …
直流调速器
SK790-2高性能全数字直流调速器
>> 37A至4000A SK790系列高性能全数字直流调速器专为满足所有的调速应用而设计,从单一直流电机传动到复杂的多电机传动系统都能胜任。790的核心是一台功能强大的32位微处理器,以及的预测电流环控制算法…
软启动
SK3000系列软启动器
SK-3000系列电机软起动器,采用智能化数字式控制,以单片机为智能中心,可控硅模块为执行元件对电动机进行全自动控制,它适用各种负载的鼠笼型异步电动机控制。使电动机在任何工况下均能平滑起动…
SK-RPMV中高压软起动柜
SK-RPMV系列中高压软起动装置采用计算机控制技术和电力电子技术相结合,以高压大功率晶闸管为主回路的开关元件,通过改变晶闸管的导通角来控制电动机电压的平稳升降和无触点通断,实现电动机的平稳起停。…
SK-RPR8智能型软起动器
SK-RPR8系列全数字智能式交流电动机软起动器是采用电力技术、微处理器技术及现代控制理论技术,具有水平的新型起动设备。同时具有键盘控制、外控端子控制、上位机控制等多种控制模式,具有故障继电器输出…
软启动
仪器、仪表
转速表
SK-2单相数显转速表
功能 测量并以数字直读方式显示出电机转速值。 品种规格及选型说明 型号SK-2转速表 SK-2数字转速表接线图
SK-1单相数显转速表
功能 测量并以数字直读方式显示出电机转速值。 品种规格及选型说明 型号SK-1转速表 SK-1数字转速表接线图
温控表
SKA
介绍 SKA系列智能温度调节仪是我公司潜心研发的一款普及型温控仪表。该仪表以单片计算机为控制中枢,具有数字PID及自整定功能,精炼的电路设计、成熟的控制程序加上进口的主要器件,使仪表具有稳定可靠、适…
SKB
介绍 SKB系列是我公司研发的新型插拔式温度控制调节仪表,此系列仪表分为通用型、增强型、工程型、程序型等4种类型产品,满足客户从低到高的各种需求。此系列仪表增加了电流检测、输出量维持、模块自动识别、…
SKC
光伏
逆变电源
SK系列逆变电源
【产品特点】 1、便携式设计,可分拆电源线。 2、采用特殊阻燃耐高温铝壳 3、配备S11插座,无需插座转换。 4、具备较高的启动能力。 5、转换效率高达90%左右。 6、5V500MA USB接口。 7、LED指示灯显示工作…
SK系列逆变电源
【产品特点】 1、便携式设计,可分拆电源线。 2、采用特殊阻燃耐高温铝壳 3、配备S11插座,无需插座转换。 4、具备较高的启动能力。 5、转换效率高达90%左右。 6、5V500MA USB接口。 7、LED指示灯显示工作状…
SK系列逆变电源
【产品特点】 1、便携式设计,可分拆电源线。 2、采用特殊阻燃耐高温铝壳 3、配备S11插座,无需插座转换。 4、具备较高的启动能力。 5、转换效率高达90%左右。 6、5V500MA USB接口。 7、LED指示灯显示…
服务与支持
资料下载
营销网络
工程案例
人才中心
代理加盟
在线留言
工程案例
西尔康变频器的应用
仪表的应用
伺服的应用
触摸屏的应用
直流调速器的应用
软启动的应用
工程案例
当前位置:网站首页 > 工程案例
机械手
一、设备说明:
机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是早出现的工业机器人,也是早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
二、工艺要求:
X、Y轴不能出现抖动和甩尾。
在伺服使能抱闸松开后刚性要大,不能往下掉一点再返回去。
三、系统构成
:
如图1所以,机械手系统由三套伺服器和伺服电机组成,分别为X、Y和Z轴,控制板卡上有三路脉冲+方向输出,可以单独对X、Y和Z轴进行控制。其中Z轴处于垂直位置,为防止掉电在重力作用下掉下来,需要使用带抱闸的电机。
图1、机械手
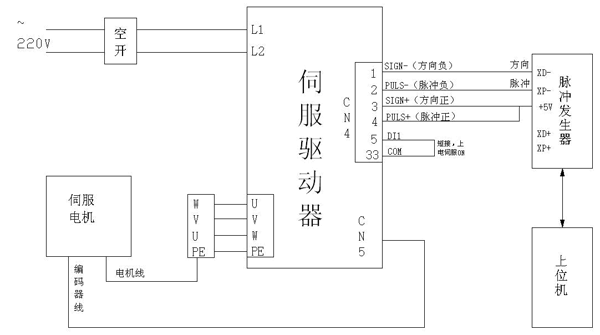
四、系统工作原理:
伺服驱动器工作在位置模式,以X轴为例,系统原理图如下图所示。通过脉冲控制卡的脉冲输出来控制伺服电机,方向信号控制电机的运转方向。 Y轴Z轴与X轴控制原理相同。
图2、 系统原理图
上一页:手机扭曲测试仪
下一页:雕刻机
打印该页
|
发送邮局
|
返回顶部
COPYRIGHT © 2014 SERKON.CN 无锡市西尔康电气有限公司 ALL RIGHTS RESERVED.
关于西尔康
|
联系我们
网站建设:君通科技 |
苏ICP备19048741号-1
苏公网安备 32021302000507号

 ◇ Z2000系列迷你型变频器:
◇ 机型外观尺寸超小,迷你精巧,
◇ 轻巧紧凑设计,操作方便
◇ 产品技术指标:
项目名称
Z2000
输入
额定电压、频率
…
◇ Z2000系列迷你型变频器:
◇ 机型外观尺寸超小,迷你精巧,
◇ 轻巧紧凑设计,操作方便
◇ 产品技术指标:
项目名称
Z2000
输入
额定电压、频率
…
 ◇ 变频器型号说明:
◇ 产品技术指标:
项 目 名 称
H2000
输入
额定电压、频率
1PH AC 220V 50/60Hz;3PH AC380V 50/60Hz
电压允许范围
…
◇ 变频器型号说明:
◇ 产品技术指标:
项 目 名 称
H2000
输入
额定电压、频率
1PH AC 220V 50/60Hz;3PH AC380V 50/60Hz
电压允许范围
…
 ◇ 变频器型号说明:
◇ 产品技术指标:
项目名称
H3000
输入
额定电压、频率
3PH380V 50/60Hz;1PH/3PH220V 50/60Hz
3PH690V 50/60Hz;3PH114…
◇ 变频器型号说明:
◇ 产品技术指标:
项目名称
H3000
输入
额定电压、频率
3PH380V 50/60Hz;1PH/3PH220V 50/60Hz
3PH690V 50/60Hz;3PH114…
 ◇ 功能描述:
1.实现多达六台水泵的供水控制,其中一台为主机,其他为从机。
2.任意主机功能:系统任意一台可选择为主机,当当前主机出故障,可以选用另一从机为主机,只需要把压力传感器信号线移到新…
◇ 功能描述:
1.实现多达六台水泵的供水控制,其中一台为主机,其他为从机。
2.任意主机功能:系统任意一台可选择为主机,当当前主机出故障,可以选用另一从机为主机,只需要把压力传感器信号线移到新…
 变频器的综合技术特性:
• 输入输出特性
- 输入电压范围:220/380/690V±15%
- 输入频率范围:47~63Hz
- 输出电压范围:0~额定输入电压
- 输出频率范围:0~600Hz
• 外围接口特性
- 可编程数字输入:7路开…
变频器的综合技术特性:
• 输入输出特性
- 输入电压范围:220/380/690V±15%
- 输入频率范围:47~63Hz
- 输出电压范围:0~额定输入电压
- 输出频率范围:0~600Hz
• 外围接口特性
- 可编程数字输入:7路开…
 1、S300产品技术规范
控
制
特
性
控制方式
…
1、S300产品技术规范
控
制
特
性
控制方式
…
 型号说明:
铭牌说明:
变频器选型:
型号
额定输电流(A)
额定输出电流(A)
适配电机
KW
…
型号说明:
铭牌说明:
变频器选型:
型号
额定输电流(A)
额定输出电流(A)
适配电机
KW
…

 >> 应用范围
电力工业:锅炉给水泵、送风机、引风机等;
采矿行业:矿井的排水泵和排风扇等;
冶金行业:高炉鼓风机、炼钢制氧机、除尘机等;
石化行业:大型输油泵、化工生产的压缩机等;城市建设:自来水…
>> 应用范围
电力工业:锅炉给水泵、送风机、引风机等;
采矿行业:矿井的排水泵和排风扇等;
冶金行业:高炉鼓风机、炼钢制氧机、除尘机等;
石化行业:大型输油泵、化工生产的压缩机等;城市建设:自来水…



 型 号
MT508T
硬件规格 ( Hardware Specifications ) …
型 号
MT508T
硬件规格 ( Hardware Specifications ) …
 型 号
MT
506L
硬件规格 ( Hardware Specifications )
外壳颜色
黑/银白可选
…
型 号
MT
506L
硬件规格 ( Hardware Specifications )
外壳颜色
黑/银白可选
…
 型 号
MT4500L
硬件规格( Hardware Specifications ) …
型 号
MT4500L
硬件规格( Hardware Specifications ) …
 型 号
MT4400T
硬件规格 ( Hardware Specifications )
…
型 号
MT4400T
硬件规格 ( Hardware Specifications )
…
 型 号
MT4300T
硬件规格 ( Hardware Specifications )
…
型 号
MT4300T
硬件规格 ( Hardware Specifications )
…
 型 号
4300C
硬件规格 ( Hardware Specifications )
…
型 号
4300C
硬件规格 ( Hardware Specifications )
…
 型 号
MT4300L
硬件规格 ( Hardware Specifications )
…
型 号
MT4300L
硬件规格 ( Hardware Specifications )
…
 >> 37A至4000A
SK790系列高性能全数字直流调速器专为满足所有的调速应用而设计,从单一直流电机传动到复杂的多电机传动系统都能胜任。790的核心是一台功能强大的32位微处理器,以及的预测电流环控制算法…
>> 37A至4000A
SK790系列高性能全数字直流调速器专为满足所有的调速应用而设计,从单一直流电机传动到复杂的多电机传动系统都能胜任。790的核心是一台功能强大的32位微处理器,以及的预测电流环控制算法…
 SK-3000系列电机软起动器,采用智能化数字式控制,以单片机为智能中心,可控硅模块为执行元件对电动机进行全自动控制,它适用各种负载的鼠笼型异步电动机控制。使电动机在任何工况下均能平滑起动…
SK-3000系列电机软起动器,采用智能化数字式控制,以单片机为智能中心,可控硅模块为执行元件对电动机进行全自动控制,它适用各种负载的鼠笼型异步电动机控制。使电动机在任何工况下均能平滑起动…
 SK-RPMV系列中高压软起动装置采用计算机控制技术和电力电子技术相结合,以高压大功率晶闸管为主回路的开关元件,通过改变晶闸管的导通角来控制电动机电压的平稳升降和无触点通断,实现电动机的平稳起停。…
SK-RPMV系列中高压软起动装置采用计算机控制技术和电力电子技术相结合,以高压大功率晶闸管为主回路的开关元件,通过改变晶闸管的导通角来控制电动机电压的平稳升降和无触点通断,实现电动机的平稳起停。…
 SK-RPR8系列全数字智能式交流电动机软起动器是采用电力技术、微处理器技术及现代控制理论技术,具有水平的新型起动设备。同时具有键盘控制、外控端子控制、上位机控制等多种控制模式,具有故障继电器输出…
SK-RPR8系列全数字智能式交流电动机软起动器是采用电力技术、微处理器技术及现代控制理论技术,具有水平的新型起动设备。同时具有键盘控制、外控端子控制、上位机控制等多种控制模式,具有故障继电器输出…

 功能
测量并以数字直读方式显示出电机转速值。
品种规格及选型说明
型号SK-2转速表
SK-2数字转速表接线图
功能
测量并以数字直读方式显示出电机转速值。
品种规格及选型说明
型号SK-2转速表
SK-2数字转速表接线图
 功能
测量并以数字直读方式显示出电机转速值。
品种规格及选型说明
型号SK-1转速表
SK-1数字转速表接线图
功能
测量并以数字直读方式显示出电机转速值。
品种规格及选型说明
型号SK-1转速表
SK-1数字转速表接线图
 介绍
SKA系列智能温度调节仪是我公司潜心研发的一款普及型温控仪表。该仪表以单片计算机为控制中枢,具有数字PID及自整定功能,精炼的电路设计、成熟的控制程序加上进口的主要器件,使仪表具有稳定可靠、适…
介绍
SKA系列智能温度调节仪是我公司潜心研发的一款普及型温控仪表。该仪表以单片计算机为控制中枢,具有数字PID及自整定功能,精炼的电路设计、成熟的控制程序加上进口的主要器件,使仪表具有稳定可靠、适…
 介绍
SKB系列是我公司研发的新型插拔式温度控制调节仪表,此系列仪表分为通用型、增强型、工程型、程序型等4种类型产品,满足客户从低到高的各种需求。此系列仪表增加了电流检测、输出量维持、模块自动识别、…
介绍
SKB系列是我公司研发的新型插拔式温度控制调节仪表,此系列仪表分为通用型、增强型、工程型、程序型等4种类型产品,满足客户从低到高的各种需求。此系列仪表增加了电流检测、输出量维持、模块自动识别、…

 【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示工作…
【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示工作…
 【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示工作状…
【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示工作状…
 【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示…
【产品特点】
1、便携式设计,可分拆电源线。
2、采用特殊阻燃耐高温铝壳
3、配备S11插座,无需插座转换。
4、具备较高的启动能力。
5、转换效率高达90%左右。
6、5V500MA USB接口。
7、LED指示灯显示…